停车场出入口车牌识别摄像机发展至今,主要存在以下瓶颈:
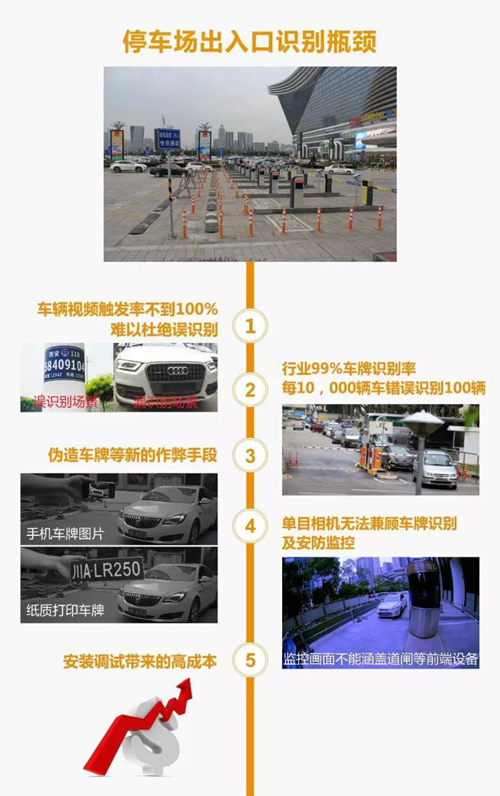
停车场出入口识别瓶颈
上述痛点一则造成了用户体验始终不高,二则无法为无人值守提供必需的基础(车牌识别率必须接近100%)。
“火眼臻睛-瞾系列车牌识别一体机”(以下简称“瞾”)的推出则彻底突破了上述瓶颈:

“瞾”突破停车场出入口瓶颈
那么“瞾”是如何实现上述突破的呢?分为两点:
一是基于双目立体视觉,对场景深度信息的挖掘;二是获取深度信息后,对车辆进行实时3D建模。
“瞾”先是基于双目立体视觉,对场景深度信息进行挖掘。
那么什么是“场景深度信息”?简单说来,就是三维立体坐标中,z轴上承载的信息:
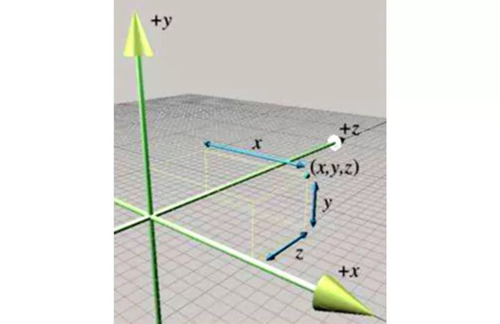
图1三维立体坐标
如图1,场景中x、y轴构成二维平面信息,z轴搭载的便是场景深度信息。

图2二维平面信息采集
如图2,单目相机只能采集二维平面信息,即X、Y轴上的信息。

图3三维立体信息解析
如图3,借助双目立体视觉对场景深度信息的挖掘,“瞾”实现了对场景三维立体信息的解析。
获取场景深度信息后,“瞾”将会对场景中车辆进行实时3D建模。
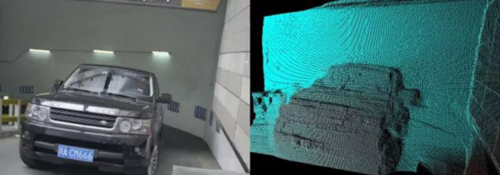
图4车辆实时3D建模
车辆3D实时建模的目的是还原车辆的真实数据(如车牌尺寸、车辆长宽高、空间距离等)。
车辆实时3D建模再结合高精度识别算法,使得“瞾”实现了100%车辆视频触发、车牌防伪、完全杜绝误识别。
如果说上文“场景深度信息挖掘”、“车辆实时3D建模”讲述的是“瞾”的软件原理,那么“瞾”的硬件支持基础就是“特制化异构双镜头”。
实际上,双镜头设计早就广泛应用于传统安防行业中,其产品形态主要分为三种:
1、普通镜头与红外镜头的组合,用于昼夜监控。
2、基于长短曝光时间不同,构建宽动态性能。
3、选择两个不同焦距的镜头,呈现不同焦距下的成像效果。
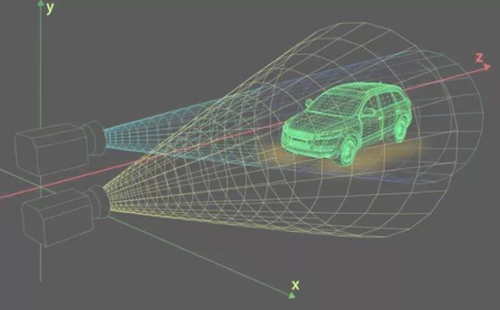
图5特制化异构双镜头构建立体视觉
如图5所示,“瞾”却不是两个摄像头的简单叠加,它采用特制化异构双镜头的最终目的,是为了持续稳定地构建双目立体视觉。
通过前面的介绍,想必大家大致了解了“瞾”如何突破停车场出入口瓶颈。接下来,我们将会说明“瞾”构建立体视觉的基础——视差原理。
什么是视差原理?我们可以用人眼产生立体视觉的过程进行阐释。

图6左右眼获取两幅不同的图像
如图6,人的双眼相距一定的瞳距,因此左右眼是从略微不同的角度观察物体,获取同一物体的两幅不同图像。
如图7所示,近处有一个人,远处有辆车,对于左眼形成的图像,人会在车的右侧。
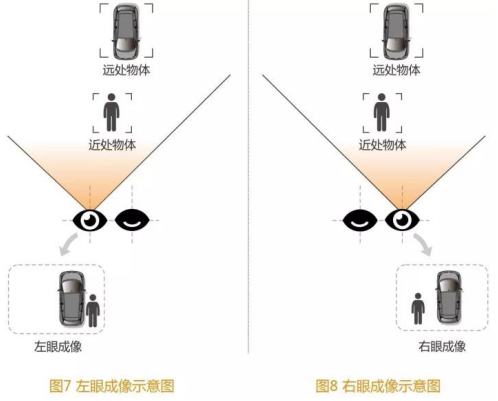
如图8所示,而右眼形成的图像中,人会在车的左侧。
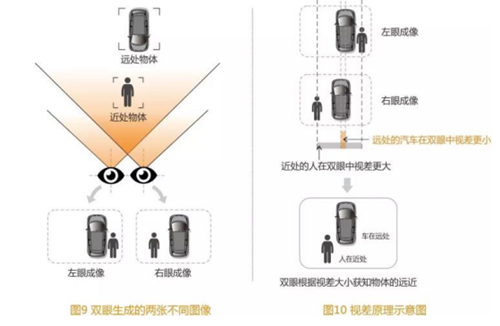
如图9,对应同一场景,双眼生成不同的图像。
如图10,左眼成像中的人与右眼成像中的人,两者间的视差相对更大。左眼成像中的车与右眼成像中的车,两者间的视差相对更小。双眼正是依据视差的不同,感知场景深度信息,这就是视差原理。
综上所述,“瞾”的推出,突破了停车场出入口识别的固有瓶颈,极大地改善了用户价值和体验,尤其是为无人化值守的实施奠定核心基础。
无人化值守不仅能让系统集成商的维护成本趋近于零,更为停车场管理方免去人力成本,是停车场出入口识别必然的发展趋势。





